
Applied Planning, Learning, and Optimization (APOLLO) Lab
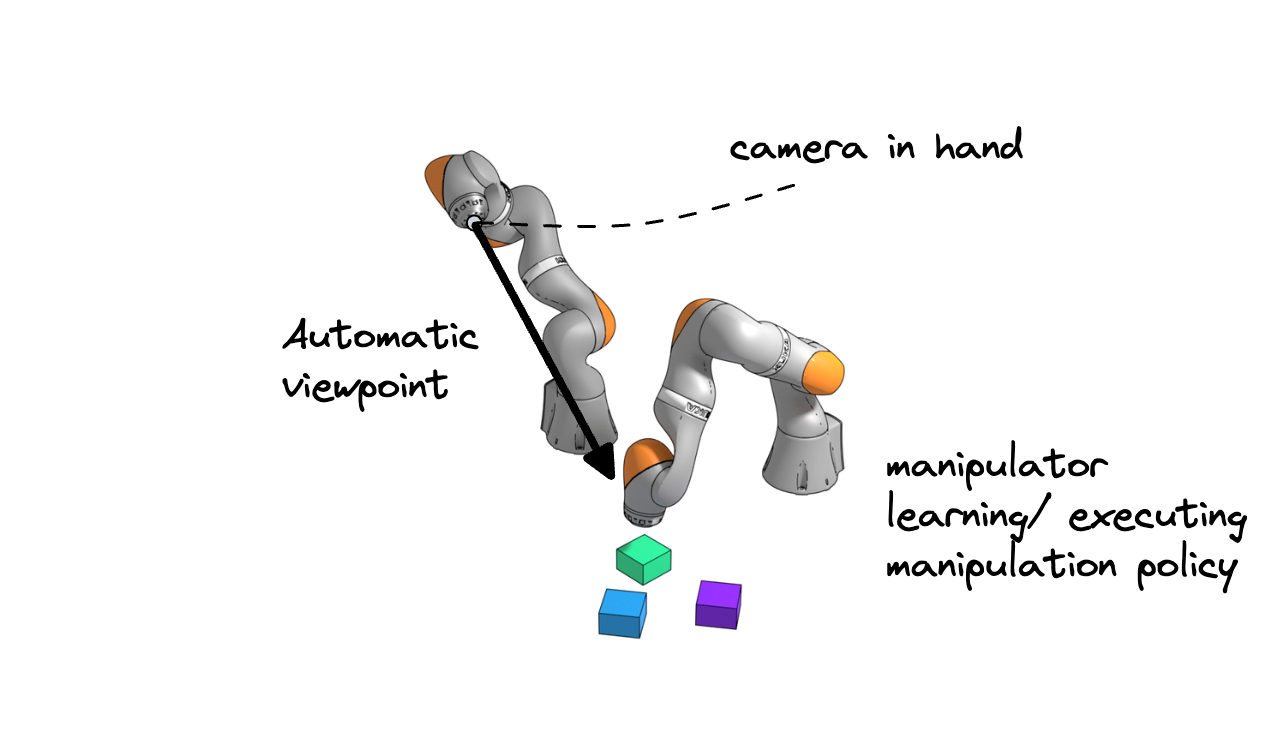
We develop algorithms for fast planning, learning, and optimization that allow robots and autonomous agents to continuously adapt as they operate, tightly integrating perception, action, and learning so systems can react quickly, gather the right information, and improve in real-time.
Our work is applied in home and assistive robotics, healthcare and robotic surgery, and disaster response.
Research Topics
Lab Space
Recent News
APOLLO Lab Hosts Robotics & AI Workshops for Yale Pathways to Science
July 8, 2026
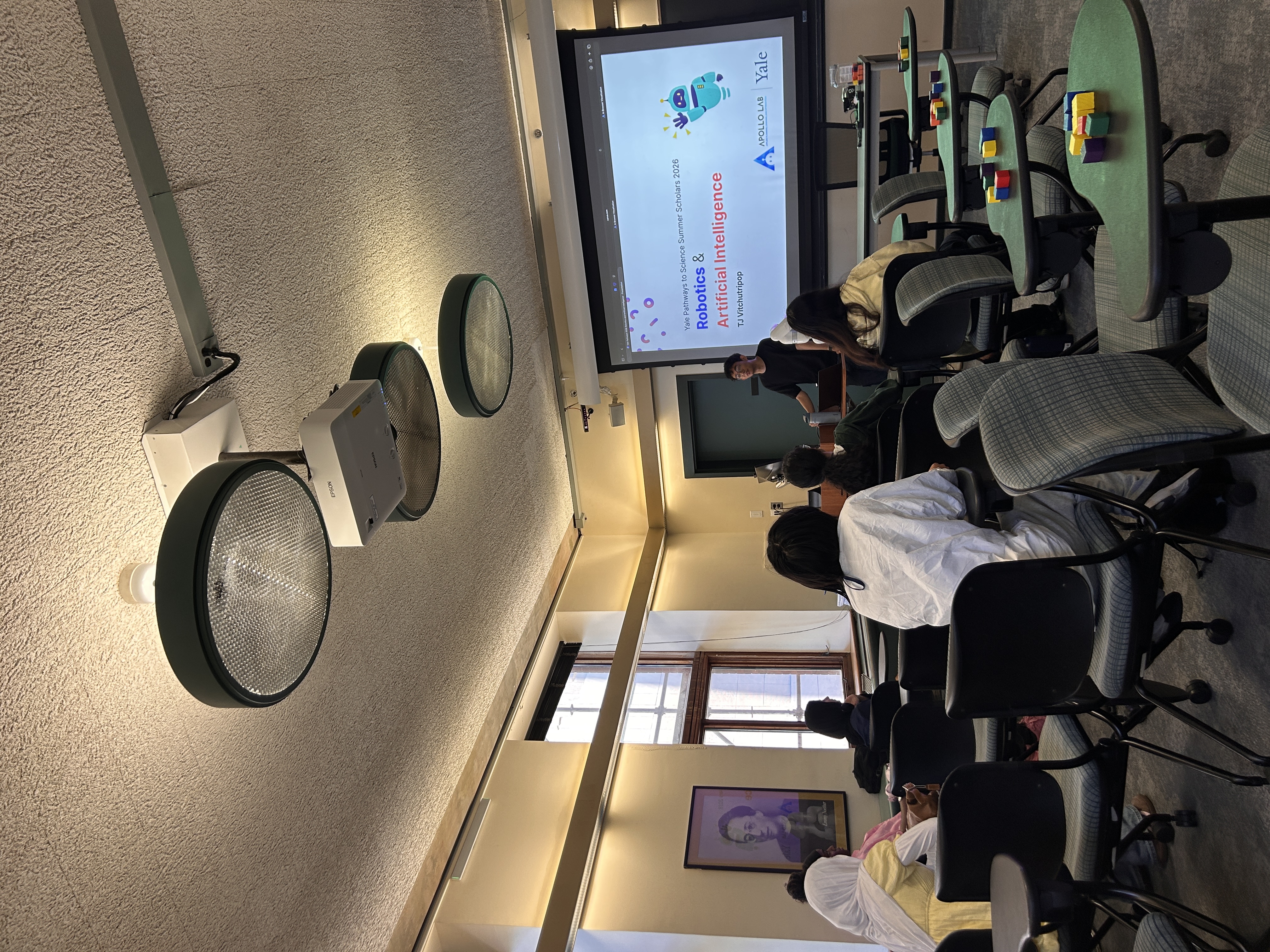
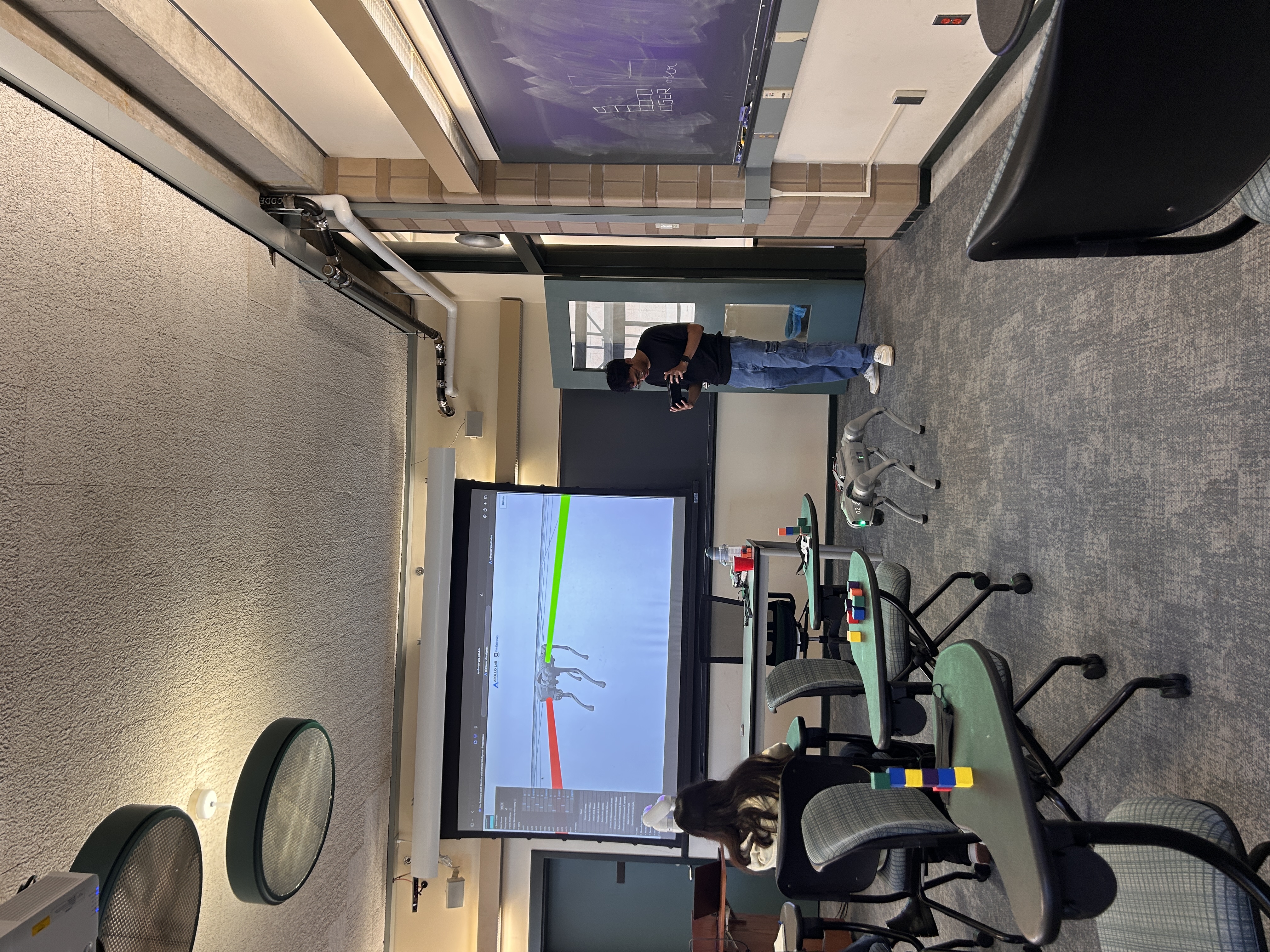

In early July, APOLLO Lab PhD student TJ Vitchutripop led multiple workshop sessions on robotics and AI for the Yale Pathways to Science program.
Yale Pathways to Science is an outreach program designed for local high school students in the greater New Haven area to attend STEM-themed events and programming organized by the Yale community.
During our workshop, students were introduced to the critical problems that roboticists encounter day-to-day and the role deep learning techniques can play in tackling some of these issues. Students had the opportunity to participate in interactive activities, gain exposure to foundational mathematical structures, and see live robot demonstrations (dancing robot dogs included)!
Paper accepted at IROS 2026
June 17, 2026
Our paper, Robust and Efficient MuJoCo-based Model Predictive Control via Web of Affine Spaces Derivatives (authors: Chen Liang, Daniel Rakita) has been accepted to the International Conference on Intelligent Robots and Systems (IROS) 2026!
APOLLO Lab at ICRA 2026 - Oral Presentation
June 1, 2026
Our paper, Hybrid Diffusion Policies with Projective Geometric Algebra for Efficient Robot Manipulation Learning (authors: Xiatao Sun, Yuxuan Wang, Shuo Yang, Yinxing Chen, Daniel Rakita) will be presented as an Oral presentation at ICRA 2026.
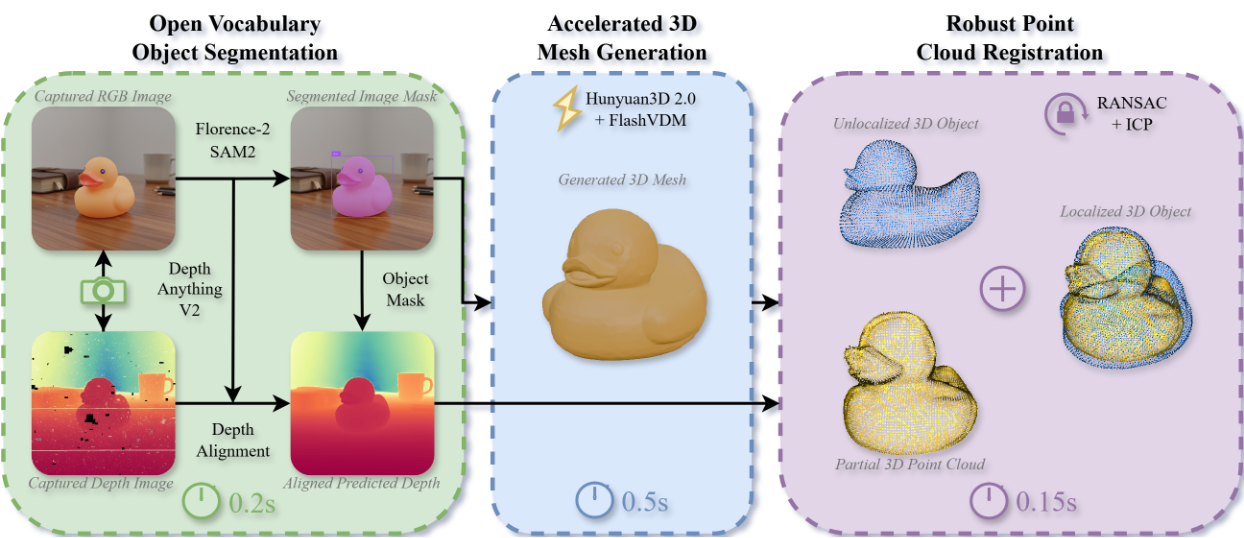
Additionally, our paper Subsecond 3D Mesh Generation for Robot Manipulation (authors: Qian Wang, Omar Abdellall, Tony Gao, Xiatao Sun, Daniel Rakita) will be in the proceedings as well, presented as an interactive poster.
Paper accepted at ICML 2026
April 30, 2026
Our lab has one paper that was accepted to the International Conference on Machine Learning (ICML) 2026 conference! This paper is:
- Turning Stale Gradients into Stable Gradients: Coherent Coordinate Descent with Implicit Landscape Smoothing for Lightweight Zeroth-Order Optimization (authors: Chen Liang, Xiatao Sun, Qian Wang, Daniel Rakita)